The Inner Workings Of A Coders Brain
CNC / Machining
CNC Controller & Machining Related Posts
Making Some Progress with new Parker 6K4 Library
44 years
It’s been a while since I wrote anything about this project, but I have been working hard on my Parker Controller library over the last few weeks. There were several goals I had in mind for this project before I even laid down any code, and I think I was able to get most of them knocked out.
The biggest goal I think, was to make a library that was easy to import into any existing project that required a Serial connection, and just Go. Add a few commands to set up the connection, and away you could go! Another large goal was to control how the library was used. I didn’t want to create something that was limited specifically to a Parker controller; And in addition to that, I may or may not want to use certain modules. So, a lot of work went into the theory of the library and I think its working out pretty good so far.
The last time I used a libraryy similar to this was in my old CNC bender projects such as FlexIO, so compared to those original versions, here is a list of key feature changes I made to improve the library for new projects in the future:
- The library is now completely independent of any existing code, and can be added to an existing project with just a few simple commands, see the example code below in this post.
- Several defines during compilation determine which parts of the library are used by your app. See Below for more specifics.
- The following key features are present in this library, some of which are controlled by defines:
- The base connection & setup code are contained exclusively within the defined object. There is Zero global code required.
- The library is capable of declaring and using MULTIPLE serial objects at the same time. Yes, you are thinking correctly. It is now possible to connect to MULTIPLE connections at exactly the same time. This means that if you need more than 4 axis, or more inputs, it is more than possible to spread this out across more than one controller. You just have to adapt your project to compensate for it!
- The library has a built-in Serial interpreter and text processing system. You can turn this off if you don’t want to use it, but it gives you a system for processing received text commands from the connection. This isn’t just limited to Parker stuff either, it works perfectly fine on any type of Serial connection. You can specify how many commands are stored internally at any time, as well as access to a number of different way of reading and interpreting those commands. Received commands are defined by text sent back from the controller with a Newline character; If the character has not been received, the data is left on the processor until one is received (and as a result, prevents mangled responses if they are only partially received from the port at the time it queries for data). If you choose not to use it, its easy to add your own code to handle this by yourself and use the built-in commands to extract the necessary data from the serial port for use in your own interpreter.
- Custom logging options, so you can output problems and data from the connection to log files.
The following is an example of some code for a typical Serial object:
// The object is created in code anywhere you like, or in your app class
// Header as a global object. Its entirely up to you. You can also define
// Multiple objects individually or in an array.
DexSerialPort ComPort;
// Clear out any previous settings that might get in the way
MyProject::ComPort.Clear();
// Set up the Connection. We can specify a unique Logfile ID to use for
// Each connection, along with a unique name for the connection. If
// Multiple connections use the same log, this name will help identify
// Where messages come from.
MyProject::ComPort.SetDexLoggerID(LOG_FILE_SERIALPORT);
MyProject::ComPort.SetConnectionName("Parker 6K6");
// Set standard connection parameters for COM3
MyProject::ComPort.SetCOMPortNumber(3);
MyProject::ComPort.SetBaudRate(9600);
// Are we using the built-in command parser and processor?
#if defined(DEX_USE_SERIAL_INTERPRETER)
// We can specify how many commands are stored from the controller
// At any one time.
MyProject::ComPort.SetCommandBufferSize(150);
#else
// The project will assume you are using your own interpreter for
// Serial Port responses and let you handle it in our own way.
#endif
// Attempt to make a connection to the device
bool ConnectResult = StrutterObject::ComPort.OpenCOMPort();
// Did we connect OK?
if (ConnectResult == true) {
// The connection was successful!! Show the About page for the
// Controller (about 40 lines of info)
Strutter.ComPort.SendSerialCommand("HELP:");
}
// We can also check at any time to make sure the controller is
// Online via code checks.
if (MyProject::ComPort.IsControllerOnline() == true) {
// Here you can do something that our project requires!
// Let's see if any data exists on the port for reading!
#if defined(DEX_USE_SERIAL_INTERPRETER)
// Query the port, do a Send/Receive of anything in the buffers
MyProject::ComPort.ProcessDataExchange();
// Do we have any commands currently stored in the command buffer?
uWord CommandsReceived = MyProject::ComPort.GetReceivedCommandCount();
// Do we have anything stored?
if (CommandsReceived > 0) {
// At least one command is available in the command buffer
for (uWord ShowCommands = 0; ShowCommands < CommandsReceived; ShowCommands++) {
// Get a char version of the received command. There are many
// Other ways to recover and interact with the commands.
// With a received command, your code can process the response
// Accordingly, but we will just dump them to the log here.
dbgmsg("Command Received: '%s'",
MyProject::ComPort.GetReceivedCommandAsString(ShowCommands);
}
}
// After all commands have been processed, empty the buffer completely
// Before querying for the next set of received commands.
MyProject::ComPort.ClearReceivedCommandBuffers();
#endif
}
// Finished using the port?
MyProject::ComPort.CloseCOMPort();
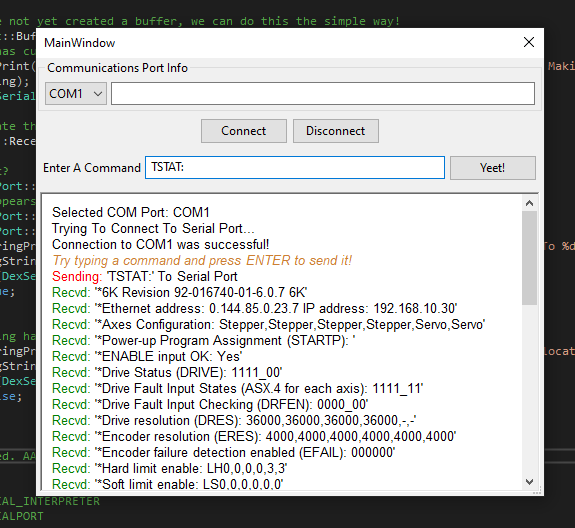
Example screenshot of a sample communication tool for any Serial connection (we used a 6K6 in this example):

Whats Next For This Library?
Im not sure! I want to keep working with this as it has been bugging my mind for a really long time. There were so many unfinished things on prior projects that I wanted to close this chapter. Then, I might work on a routing table or something similar. Until the next time! Feel free to leave any comments or questions below!
Getting Back Into Parker 6K4 / 6K6 Controller Programming Again
05 years
Its been a long time since I did any work on the Parker Controllers, but I have been having the itch again for quite a while to do some more work on it. There were many things I was doing with the controller that could have been optimized, or improved – such as better feature detection and improved latency. I also never really got around to adding encoder support for any of my previous projects with the controller.
I recently got a Parker 6K6 controller from eBay to work with. They are available for less than 50 dollars nowadays. Its been a lot of fun writing new code to talk back and forth with the controller in a proper, organized way. I have made a new basic communication library that allows easy connection and Send/Receive capability and can be shared across various C++ projects, so if I want to make something new I can just import that code and get going. Adding an interface with wxWidgets 3.xx is fairly straight forward and saves a lot of time. A long time ago I had used an old Parker controller (It wasn’t a 6K4, it was a much older model that used an ISA connection card) to make an experimental CNC routing table for a saw. It was pretty basic, it just about worked but wasn’t very good.
My son is also going to tech school and has been expressing an interest in learning how to work with CNC machines a little more in-depth than just loading a model and pressing the Start button, so I think if I can teach him some of this from a purely technical level, it will help him understand better. I think that him helping to build the machine and understand the programming will be quite beneficial. G-Code in itself is quite a complex thing to learn, especially from an optimization stand point, so we will have to see how it goes.
As I make progress in code, I will make some updates here. If you are interested in this sort of thing or have any questions, let me know in the comments below. Not sure anyone even uses this controller anymore!
Prototyping New CNC FlexIO Program
214 years
 I have been working on a new version of my FlexIO program for quite some time new, which has a lot of new features in it including use of wXwidgets for the GUI interface, better accuracy, and even more tools & control for the operator using it. This week I have finally began connecting stepper motors to it, and doing some real motor experiments.
I have been working on a new version of my FlexIO program for quite some time new, which has a lot of new features in it including use of wXwidgets for the GUI interface, better accuracy, and even more tools & control for the operator using it. This week I have finally began connecting stepper motors to it, and doing some real motor experiments.
There have been other significant improvements to the program as well, especially on the controller side. It is still using the Parker 6K4/ZETA4 Combo, only now with the new code the communication between the hardware and the controller is much more effective. It also does not need such a high end PC to run, as now there is no DirectX requirements, there doesn’t need to be any high refresh rates. This was a problem with the MicroATX computer used on Joshua, and a problem of the old program anyways. We all do crazy things when we have very little time to complete a project 🙂
Now that the new program is going through the final paces of it’s hardware testing, I hope to have this finished and out of the way within the next couple of weeks depending on how many free nights I get to work on it. I have a lot of other projects building up that I need to work on! Click on any image to see an enlarged version.
In the above picture: Hardware setup from the original FlexIO Classic program. On the left are 3 ZETA83-135-MO Parker stepper motors, each connected to a ZETA4 controller box (the 3 stacked units to the right of the motors). These are then connected to the Parker 6K4 controller box (the large box to the right of the ZETA4 units, with 4 red LED’s on the top) which controls the motor’s movement. The 6K4 is then connected to the PC via an RS-232 connection, which receives instructions from FlexIO. During the development process, laying the motors out flat like this is a good way to test the motor communication & the programs ability to switch between motors and steps accurately and smoothly, without damaging any real hardware in the event that a problem might occur.
Screenshot of the current beta program interface for setting up the cable being processed:


New FlexIO Module – XYZ Movement Detection
014 years
 I added a basic module to the new FlexIO program this week to assist in detecting moved XYZ tables. After a frustrating day at the office, I came home, had a few beers and came up with this solution to try and fix my problem for the next time. A common problem I faced was after a drawing had been created for a part, the actual part itself had been moved in virtual space. Then when the bend file had been created, the tables were completely different because of the move. Because of this, how to correctly determine if the table is actually correct, or if there was an actual geometry change in the design that had been overlooked?
I added a basic module to the new FlexIO program this week to assist in detecting moved XYZ tables. After a frustrating day at the office, I came home, had a few beers and came up with this solution to try and fix my problem for the next time. A common problem I faced was after a drawing had been created for a part, the actual part itself had been moved in virtual space. Then when the bend file had been created, the tables were completely different because of the move. Because of this, how to correctly determine if the table is actually correct, or if there was an actual geometry change in the design that had been overlooked?
The module I created just looks for simple X/Y/Z direction movements, it gets a little more complex when looking for parts that have been rotated in 3D space, so the model doesn’t look for that yet. It works by asking for the first row of coordinates from the drawing, and calculates the differences between the X/Y/Z in the bend file. If its just a case of simple movement, the offset is applied to the remaining points and the new table when updated will then identically match the drawing (if there is no geometry change). If you start seeing some points being a little off, you can check in CAD to make sure there is no rotation, and put the difference to being a design change which requires the original part designer to submit a revision change.
It’s a start, and saves me a lot of time when verifying a large number of drawings at one time. Still lots of other verification code to add to other areas of the program 🙂
New CNC Bender Completed – ‘Sir Clive’
015 years
I have finished working on my 3rd CNC bender, named “Sir Clive” after the great Sir Clive Sinclair. He received a complete refit and various other components. Details of this hardware/software project can be viewed at this link:
https://www.andykellett.com/cnc-projectshardware/sir-clive-bender/
You can also read about the custom software I wrote to power the machine, named FlexIO, at this page:
https://www.andykellett.com/my-discography/flexio-classic/
This project has been a lot of work, and now it is ready I can finish some other projects. Thanks!
Upgrading / Tearing Down Another CNC Bender
015 years
by FishGuy876
in CNC / Machining
So, I started working on the teardown for my latest CNC Bender upgrade today. This is a Seven Associates long bender, currently equipped with an AT6400 controller, Windows 95 PC and lots of other vintage goodies. If all goes well, after installing the new equipment this next week or so, this puppy should be up to par in about 2 weeks time.

This machine will be called “Sir Clive”, after the great Sir Clive Sinclair who invented the ZX Spectrum, on top of many other great little gadgets. Stay tuned for updates about it’s progress, and more!
Recent Comments